

Pocos jets hay como el J10, y menos aún como el diseñado por el equipo Elster formado por Ralph y Enrico. Capaz de un vuelo de jet convencional y también de increíbles maniobras normalmente reservados a los acrobáticos 3D más purasangre.
El montaje no es más difícil que un jet convencional, aunque sí requiere algo más de atención y detalle para lograr un montaje ligero. Una vez superado las dificultades del peso, el modelo en vuelo te lo agradecerá enormemente.
En mi caso, cuidé el peso hasta el más mínimo detalle, incluso escogiendo los servos no por su fuerza, sino su peso, además de instalar cómo no el tren de carbono y ruedas de espuma para limitar al máximo todo peso innecesario.
El montaje habitual del J10 instala una JetCat P180Rxi pero habiendo visto a Ralph en Chile montando el prototipo 01 del nuevo JetCat P220Rxi tenía claro que éste era el motor que yo quería montar. Implicó unos cambios en la bancada (lo cual fue necesario alargarlo) y en las varillas de la tobera vectorial (de ponerlo en su posición normal se cruzaban con la turbina al ser éste algo más grande que la 180.




Equipo:
(x1) P220Rxi de JetCat
(x1) Mercury SRS de Powerbox-Systems
(x7) Servos:
(x7) Ds1240 de MKS Servos
(x1) Set struts de carbono de Elster
(x1) Set retráctil C40 de Behotec
(x3) Baterías OptiPower 5.000mAh 2S (x2 centralita, x1 ECU)
(x2) Receptores R7003SB
Accesorios:
(x1) Teleconverter de Powerbox-Systems
(x1) Telemetrie Adapter de JetCat
(x1) FOD Guard de JetCat
(x1) Bomba de humo de Powerbox-Systems
(x1) GBR 260 UAT/Hopper tank
(x2) Electrovalvulas (x1 1 vía, x1 2 vías)
De lo más entretenido del montaje, es la propia programación, ya que como ejemplo, se puede trimar la profundidad desde tres sitios, ya sea desde la profundidad, desde el canard o desde la vectorial.
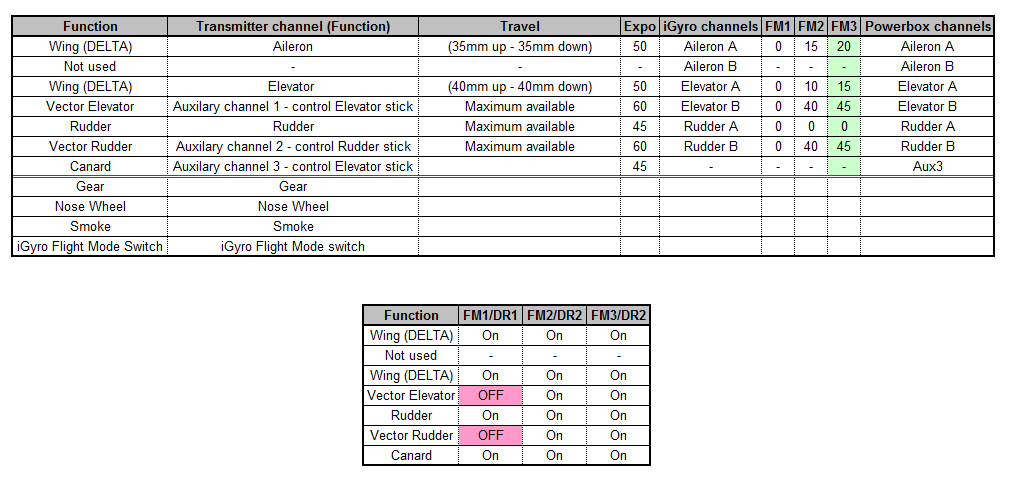
Yo opté por una configuración muy básica, en el cual buscaba un ajuste único para todo el vuelo (no me gusta el uso de dual-rates ni condiciones de vuelo) por tanto ya tenía claro que la tobera iba a estar siempre activada y a tope, y el giróscopo también aunque con una ganancia “normal” para permitir no tenerlo que apagar durante el vuelo.
Sabiendo esto, la configuración se facilitaba bastante, con un único exponencial, un único mando, un único ajuste y los canales de vectorial y canard simplemente mezclados todos juntos a 100% “on” en la emisora.
La configuración de Delta lo hacemos desde la centralita, usando las salidas del gyro de la siguiente forma:
-Gyro Aileron 1 – Ala izquierda (Delta)
-Gyro Aileron 2 – Inutilizado
-Gyro Elevator 1 – Ala derecha (Delta)
-Gyro Elevator 2 – Tobera vectorial en eje profundidad (delta no afecta mezcla delta a GE2)
-Gyro Rudder 1 – Dirección
-Gyro Rudder 2 – Tobera vectorial en eje dirección
El resto de canales, quedan libremente programados desde la emisora:
-Canard
-Tren
-Frenos
-Rueda de morro
-Turbina
-Humo
Lo que sí cabe destacar, es llevar cuidado con los canales de gyro (son muchos!) y durante su programación y antes del primer vuelo y puesta en marcha, revisar (por duplicado!) que el sentido de corrección del gyro es el correcto.
El centro de gravedad no lo miré, porque habiendo volado varios J10 sabía que el truco está en dejarlo lo más atrás posible pero que aún permite apoyarlo en el suelo sin que se levante el morro.
El primer vuelo el modelo ponía los pelos de punta a todos los presentes, y a mi el primero. Pero fue todo un éxito, y con las configuraciones de mando indicados en el manual el vuelo es muy agradable.
Cada vez me encuentro más a gusto con el modelo y de verdad empiezo a disfrutar, al igual espero que todos vosotros con las fotos, videos y eventos que vaya realizando.

























